Mecanum Drive (Part 1)
- GM0's Mecanum Drive Tutorial - Detailed tutorial containing explanations regarding the math and logic behind mecanum drive code along with sample opmodes. Must read before proceeding!
- PID Control - Must Read
- FTC Team 7477's Mecanum Drive Video - Supplemental resource explaining how a mecanum drive train would appear on a physical robot.
- FTC Team 9794's Mecanum Block Programming Video - For block code users.
What is Mecanum?
A mecanum drive system makes use of a special type of wheel known as mecanum wheels which allow robots to move not only forward and backward, but sideways as well. Here is a quick demo of the capabilities of mecanum:
Mecanum drive systems allow teams to move efficiently during both the autonomous and driver-controlled periods due to the added directions of movement that are not present in tank drive trains. Moreover, due to its ease of construction mecanum drive trains over other options (ie differential swerve), mecanum is the most used drive variation in FTC robotics.How It Works
The mecanum drive train consists of two sets of wheels, two right wheels, and two left wheels, depending on the direction the rollers are facing. The rollers are angled at 45°. The force vectors created by the wheel arrangement propel the drive train in different directions.
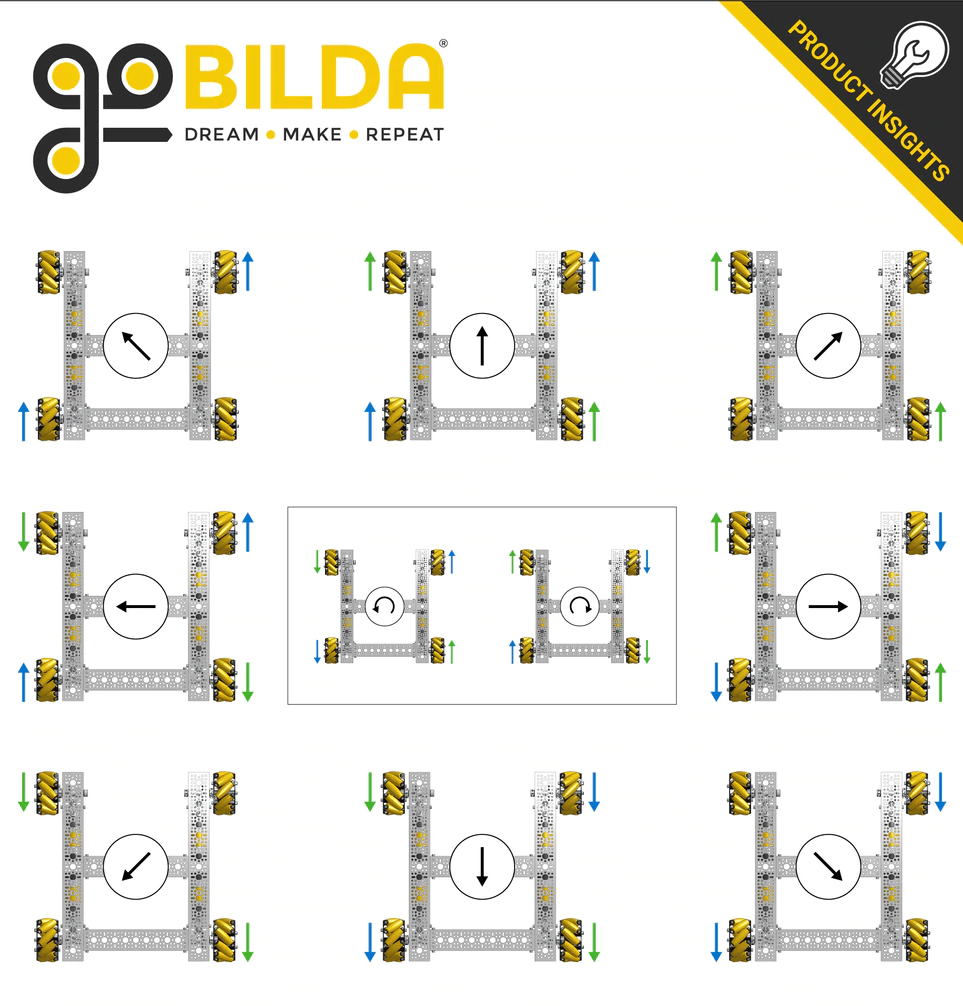
This picture is a very good reference to show how the different combinations of power set to the wheels change the direction the drive train will go.
TeleOp Implementation (Robot Centric)
The concept of the mecanum drive implementation relates to the tank drive train implementation. However, in this case, you need three components. Those are drive, turn, and strafe. As you've probably realized the only difference in programming the mecanum drive and tank drive is the strafe component. We are using the left joystick y-axis for the drive, the right joystick x-axis for the turn, and the left joystick x-axis for the strafe. Assume frontLeft, frontRight, backLeft, and backRight are the initialized drive motors.
double drive;
double turn;
double strafe;
double fLeftPow, fRightPow, bLeftPow, bRightPow;
// Reverse the right side motors
// Reverse left motors if you are using NeveRests
frontRight.setDirection(DcMotor.Direction.REVERSE);
backRight.setDirection(DcMotor.Direction.REVERSE);
drive = gamepad1.left_stick_y * -1;
turn = gamepad1.right_stick_x;
strafe = gamepad1.left_stick_x;
fLeftPow = Range.clip(drive + turn + strafe, -1, 1);
bLeftPow = Range.clip(drive + turn - strafe, -1, 1);
fRightPow = Range.clip(drive - turn - strafe, -1, 1);
bRightPow = Range.clip(drive - turn + strafe, -1, 1);
frontLeft.setPower(fLeftPow);
backLeft.setPower(bLeftPow);
frontRight.setPower(fRightPow);
backRight.setPower(bRightPow);
As you can see, the drive and turn components are the same as the tank drive. However, due to the fact that strafing needs wheels on the same side to be spinning in opposite directions, each wheel will need its own power.
Oftentimes, teams will have a problem where everything seems right in the code but the robot is not moving as expected. If this occurs, the orientation of the mecanum wheels may be incorrect. The rollers should form an "X" shape from the top of the robot.
Creating a Field-Centric-Based Autonomous Program
The following code uses field-centric drive code to control the mecanum wheels, not the robot-centric code used above. To gain a solid understanding of field-centric driving please refer to the GM0 link in the resources tab of this module.
The following code is provided to showcase a simple method of autonomously controlling a mecanum drive system without cluttering the code with odometry functions. For a more accurate and sophisticated mecanum control system, please refer to the mecanum modules in the autonomous driving section.
Demo Video of the Code Used
The logic behind this code is fairly simple, we make use of field-centric driving to make the robot drive forward or sideways for some number of seconds. Making use of encoders should make this movement fairly accurate as a velocity PID will be automatically enabled. However please note that later modules will provide code that is far superior to the following implementation! We also use a heavily simplified version of a PID controller to enable the robot to turn to a desired angle while moving, making use of the IMU to do this.
Note that because we make use of field centric drive code the robot will always drive and strafe in the same direction regardless of the robots heading. Field centric does this by modifying the drive and strafe commands in accordance with the robot's heading such that the velocity commands will make the robot move in the same direction regardless of its orientation. For instance, setting the strafe velocity to -0.1 will always make the robot move sideways to the left regardless of what direction the robot is in. If we made use of robot centric driving, setting the strafe command to -0.1 when the robot is facing 90 degrees would actually make it drive forwards.
This makes things alot easier for the programmer as they do not need to worry about adjusting the command velocities to account for a change in the robot's heading.
Code
Note that in the following line: double turn = Range.clip(angleDiff * 0.01, -1, 1); we set the power that the robot should turn at to reach the angle desired. You can modify this speed as needed by changing the constant 0.01 as needed, increasing it to increase the turn speed, and decreasing it to slow the robot down.
Robot Class
public class Robot {
Motor fLeftMotor, bLeftMotor, fRightMotor, bRightMotor;
BNO055IMU gyro;
List<LynxModule> allHubs;
public Robot() {
// Configuring Hubs
allHubs = hardwareMap.getAll(LynxModule.class);
for (LynxModule hub : allHubs) {
hub.setBulkCachingMode(LynxModule.BulkCachingMode.AUTO);
}
// We recommend that you make use of encoders if using this method!
Motor fLeftMotor = new Motor(hardwareMap, "front_left_motor");
Motor bLeftMotor = new Motor(hardwareMap, "back_left_motor");
Motor fRightMotor = new Motor(hardwareMap, "front_right_motor");
Motor bRightMotor = new Motor(hardwareMap, "back_right_motor");
// Reverse the right side motors
// Reverse left motors if you are using NeveRests
fRightMotor.setDirection(DcMotorSimple.Direction.REVERSE);
bRightMotor.setDirection(DcMotorSimple.Direction.REVERSE);
this.fLeftMotor = fLeftMotor;
this.fRightMotor = fRightMotor;
this.bLeftMotor = bLeftMotor;
this.bRightMotor = bRightMotor;
this.gyro = gyro;
this.opMode = m;
this.allHubs = allHubs;
}
// Use the IMU to return the angle of the robot.
public double getAngle() {
Orientation angles =
gyro.getAngularOrientation(
AxesReference.INTRINSIC, AxesOrder.ZYX, AngleUnit.DEGREES); // ZYX is Original
return angles.firstAngle;
}
// Remaps the given angle into the range (-180, 180].
public static double normalize(double degrees) {
double normalized_angle = Angle.normalizePositive(degrees);
if (normalized_angle > 180) {
normalized_angle -= 360;
}
return normalized_angle;
}
// Drive or Strafe to at some power while turning to some angle.
public void driveFieldCentric(double drive, double angle, double strafe) {
// https://gm0.org/en/latest/docs/software/tutorials/mecanum-drive.html#field-centric
double fRightPow, bRightPow, fLeftPow, bLeftPow;
double botHeading = -Math.toRadians(gyro.getAngularOrientation().firstAngle);
// Compute how much you need to turn to maintain that angle
currAngle = getAngle();
double angleDiff = normalize(currAngle - angle);
double turn = Range.clip(angleDiff * 0.01, -1, 1); // multiply by some constant
// so the robot turns smoothly
double rotX = drive * Math.cos(botHeading) - strafe * Math.sin(botHeading);
double rotY = drive * Math.sin(botHeading) + strafe * Math.cos(botHeading);
// Do the math found in GM0
double denominator = Math.max(Math.abs(strafe) + Math.abs(drive) + Math.abs(turn), 1);
fLeftPow = (rotY + rotX + turn) / denominator;
bLeftPow = (rotY - rotX + turn) / denominator;
fRightPow = (rotY - rotX - turn) / denominator;
bRightPow = (rotY + rotX - turn) / denominator;
setDrivePowers(bLeftPow, fLeftPow, bRightPow, fRightPow);
}
public void setDrivePowers(double bLeftPow, double fLeftPow, double bRightPow, double fRightPow) {
bLeftMotor.setPower(bLeftPow);
fLeftMotor.setPower(fLeftPow);
bRightMotor.setPower(bRightPow);
fRightMotor.setPower(fRightPow);
}
public void stopDrive() {
setDrivePowers(0, 0, 0, 0);
}
// Misc. Functions / Overloaded Method Storage
private double getVoltage() {
double voltage = Double.MIN_VALUE;
for (LynxModule hub : allHubs) {
voltage = Math.max(voltage, hub.getInputVoltage(VoltageUnit.VOLTS));
}
return voltage;
}
@Override
public void runOpMode() throws InterruptedException {}
}
Opmode
import com.qualcomm.robotcore.util.ElapsedTime;
@Autonomous(name = "Sample", group = "Robot")
public class BluePrimary extends Robot {
@Override
public void runOpMode() throws InterruptedException {
sleep(500);
telemetry.addData("Status", "Initialized");
telemetry.update();
waitForStart();
timer.reset(); // allows you to keep track of how long the robot has been driving
while (timer.milliseconds() <= 500){
// drive backwards at 15% power at an angle of 0 degrees for 500 milliseconds
driveFieldCentric(-0.15, 0, 0);
}
stopDrive(); // always stop the drive train after a movement!
timer.reset(); // always reset the timer before starting another movement!
while (timer.milliseconds() <= 1200) {
// move right at 30% power at an angle of 10 degrees
dt.driveFieldCentric(0, 10, 0.3);
}
}
}